In Nanosystems, Dr. Drexler presented several designs for molecular manipulators, including a 100 nm-scale manipulator arm estimated to contain about 4 million atoms. Another design based upon a Stewart platform was estimated to contain about 3 million atoms. Mechanisms of this size and complexity were proposed and analyzed based upon a bounded continuum model, rather than designed to atomic detail. Another family of six degree of freedom positional devices of comparable scale has been discussed by Dr. Ralph Merkle. Here Dr. Drexler presents an atomically detailed design for a much smaller molecular manipulator, containing 2,596 atoms. As described by Dr. Drexler:
A general-purpose molecular assembler arm must be able to move its "hand" by many atomic diameters, position it with fractional-atomic-diameter accuracy, and then execute finely-controlled motions to transfer one or a few atoms in a guided chemical reaction. Our arms use large muscles and joints for large motions, but more finely-controlled finger motions for precision. Assembler mechanisms will likely be designed along similar lines.
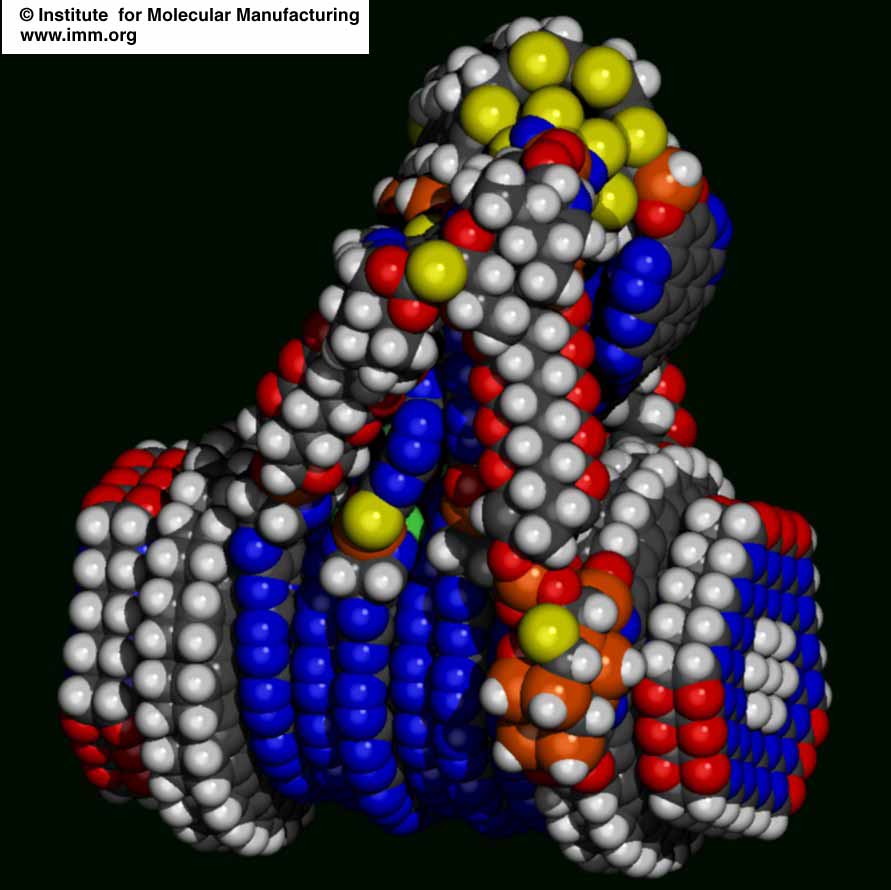
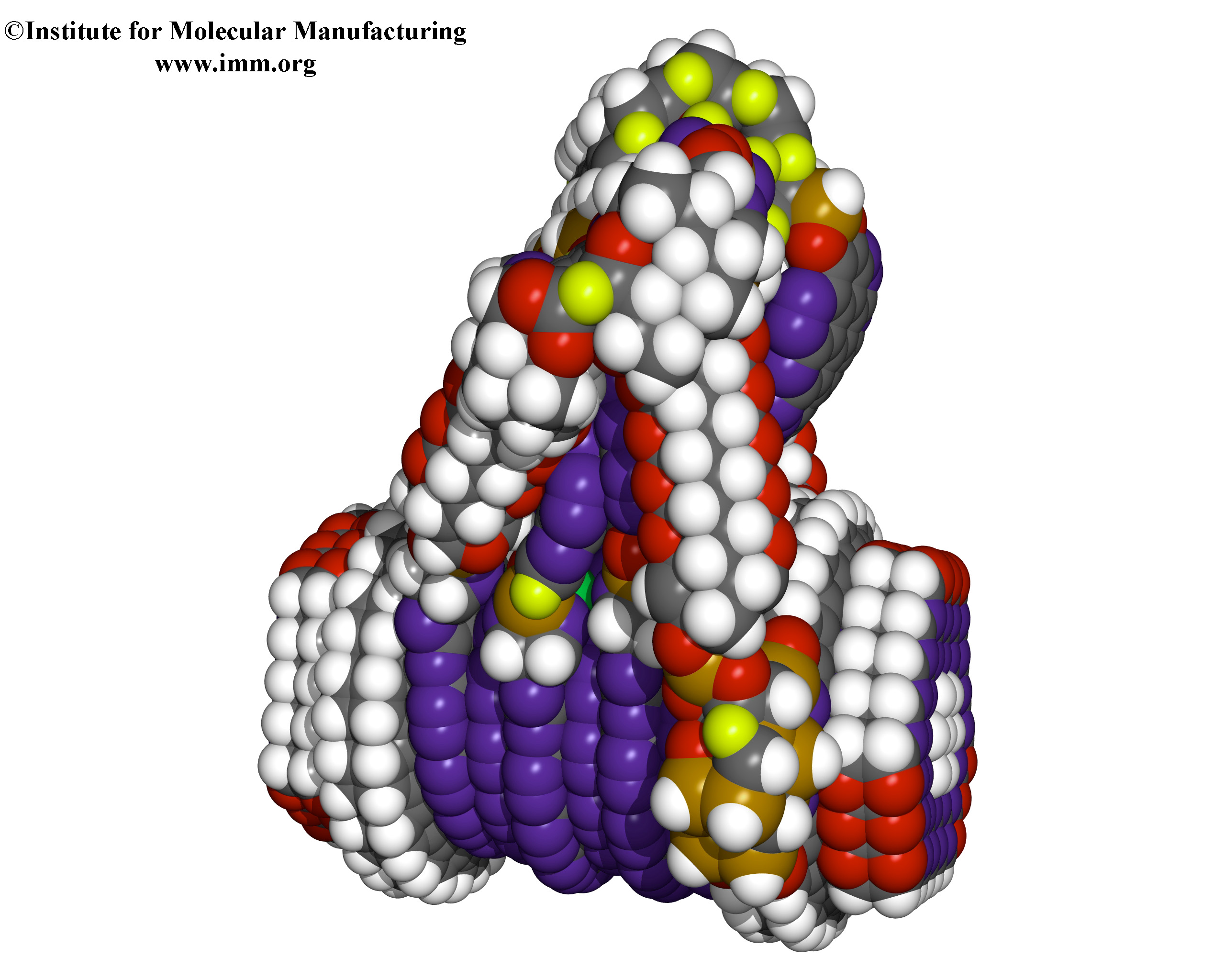
This illustration shows a structure resembling a Stewart platform that results from a long sequence of designs and redesigns aimed at specifying the atomic structure of a molecular-scale fine-motion controller. Its core consists of a shaft linking two hexagonal endplates, sandwiching a stack of eight rings. In a complete system, each ring would be rotated by a lever driven by a cam mechanism. Each ring supports a strut linked to a central platform (here shown raised, displaced, and twisted). Rotating a ring moves a strut; moving a strut moves the platform; positioning all eight rings (over-)determines a platform position in x, y, z, roll, pitch, and yaw. (If the struts were rigid, six would do the job; here, two struts have been added to increase stiffness, decrease elegance, and annoy Ralph Merkle.) The chief design problem is to enable an adequate range of motion without mechanical interference or unacceptable bond strains, and within the size constraints set by available modeling tools and patience. The illustrated structure can execute precise motions over several atomic diameters with associated 90-degree rotations, and contains fewer than 3,000 atoms.
—K. Eric Drexler

A fine-motion controller for molecular assembly
A large version of this picture is
available (891×890 pixels, 73K file).
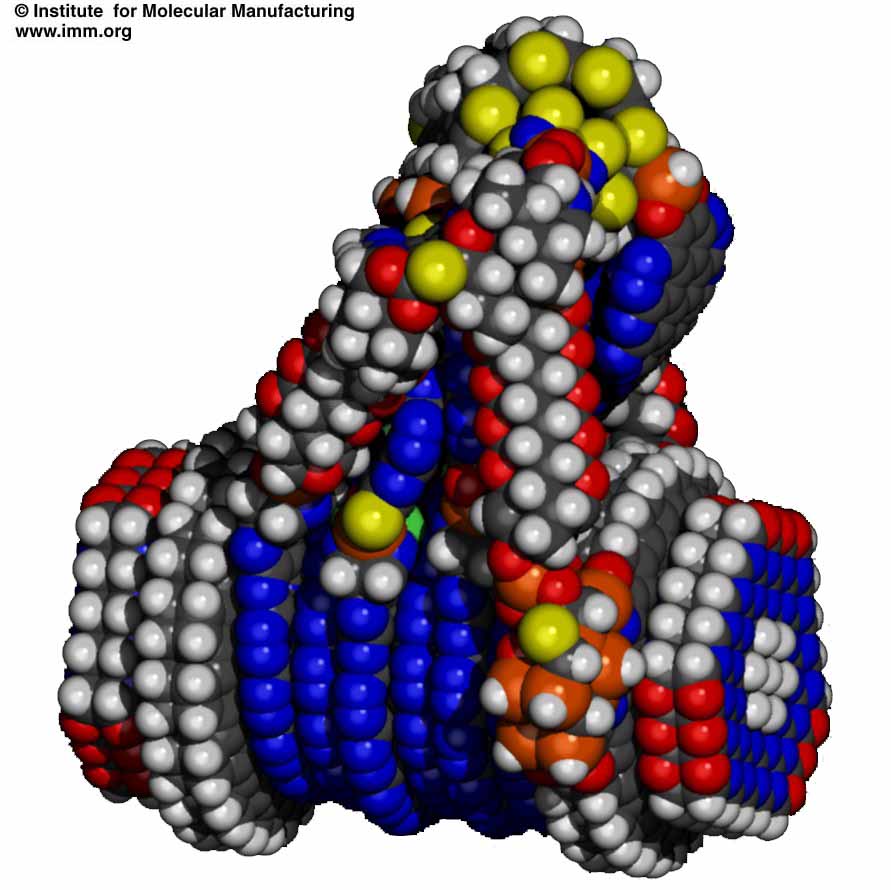
A version with a white background
is available (891×890 pixels, 79K file).
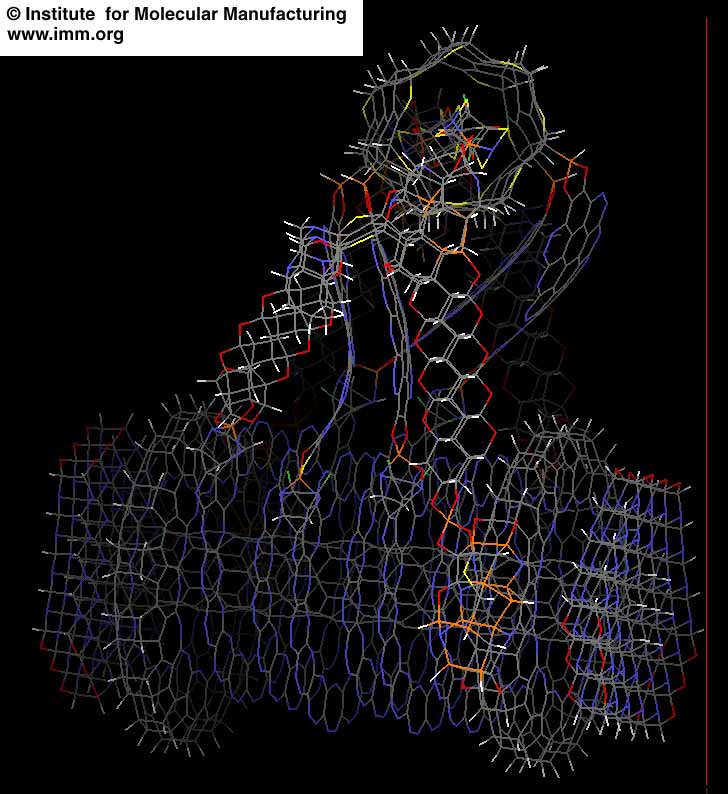
An alternative wire frame display
of this device is also available (728×794 pixels, 99K file).
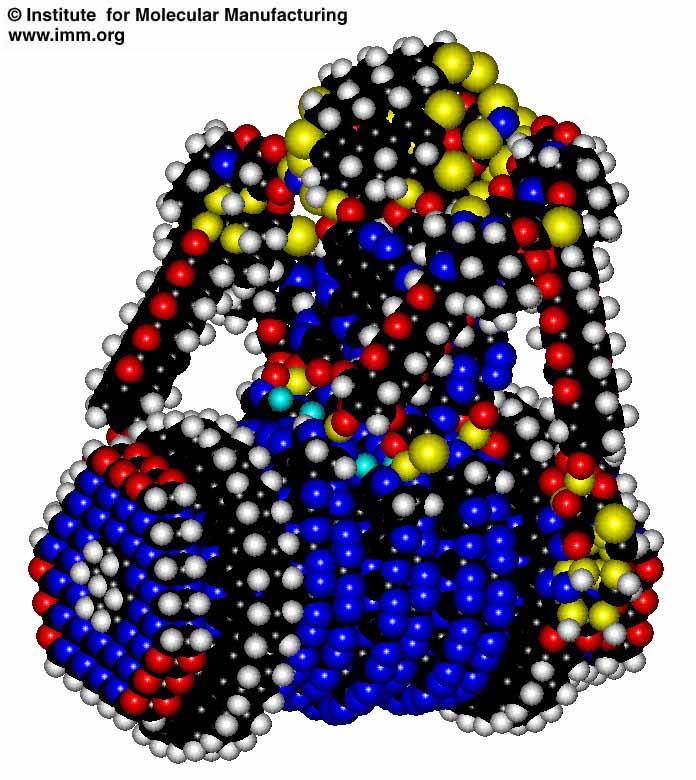
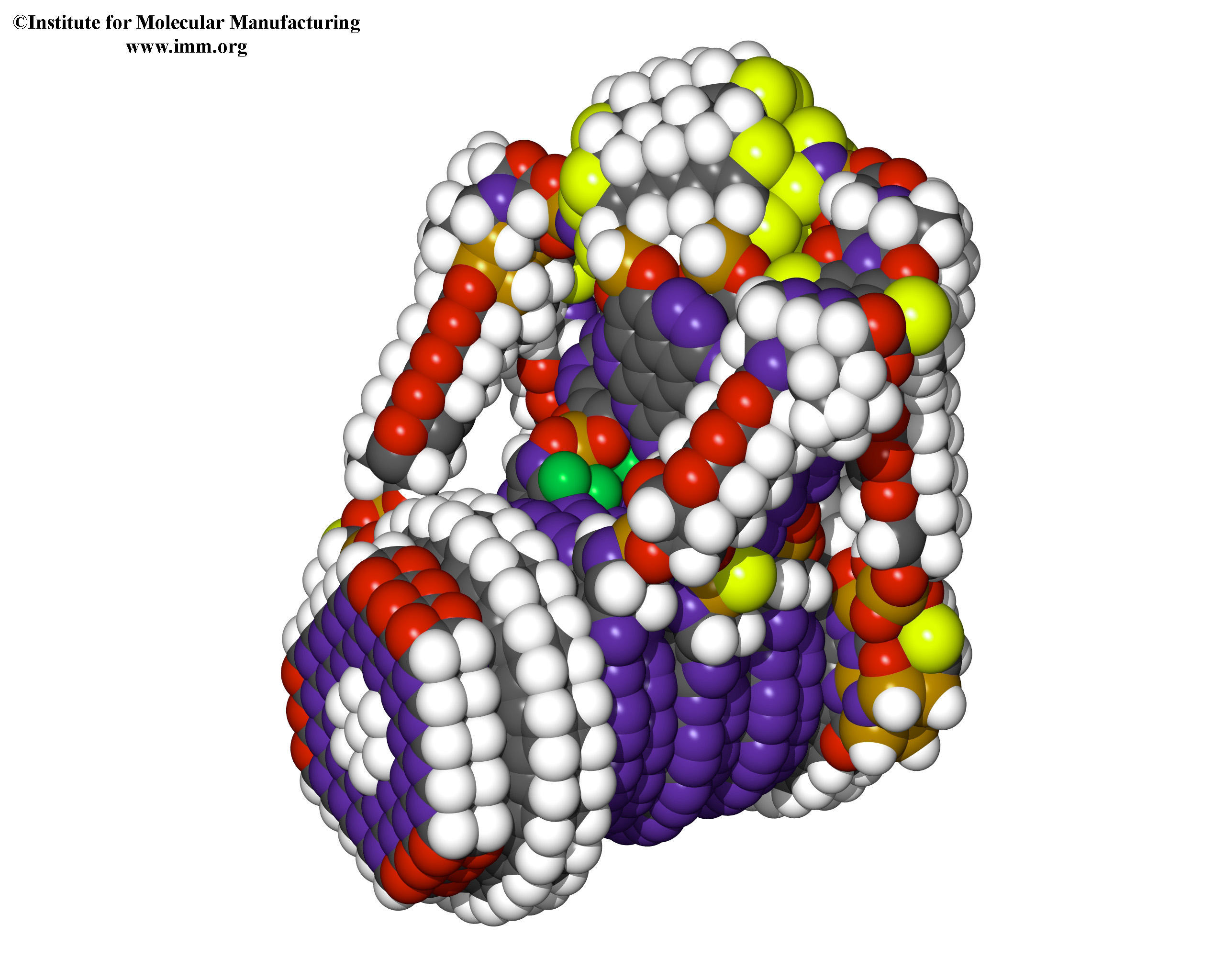
A view from a slightly different angle
is available (696×780 pixels, 100K file).
A very high resolution image is available (2560×2048 pixels, 583K file)
A very high resolution image from a different angle (2560×2048 pixels, 623K file)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Additional pictures are available at the NASA Ames Research Center Nanotechnology Gallery.
Ralph Merkle has assembled a page of high resolution images of proposed molecular devices.
Designs for molecular machine parts, produced by K. Eric Drexler, or by K. Eric Drexler and Ralph C. Merkle, that appear on the Web sites of the Foresight Institute and the Institute for Molecular Manufacturing (IMM) are copyrighted by IMM. It is not necessary to obtain permission to use IMM-copyrighted images for either commercial or non-commercial purposes. Permission to use the images is granted on the condition that credit is given and our copyright notice appears in the publication. Images should also contain the URL for IMM (www.imm.org).
Atomic Coordinates Available
Dr. Drexler has made the pdb file for this fine motion controller available at this site using the link below. If you do not have your browser configured with a helper application that can read pdb files, you will see this file as a long text file listing the three dimensional coordinates and connectivities of 2596 atoms. If you do have your browser configured with an application that can read pdb files, or save the file to disk and open it with such an application, then you will see a graphic representation of the fine motion controller, but one which you can manipulate to inspect from various angles.
241KB PDB file of fine motion controller
Free tools for visualization of molecules defined by PDB files